Tracker 2
Nov 30, 2009
I used a PIC18F microcontroller to make a second version of a solar tracker.
I decided to introduce PWM to slow the tracker down as it fine tunes its direction.
My existing motors could not take advantage of this, so I ordered some small linear actuators.
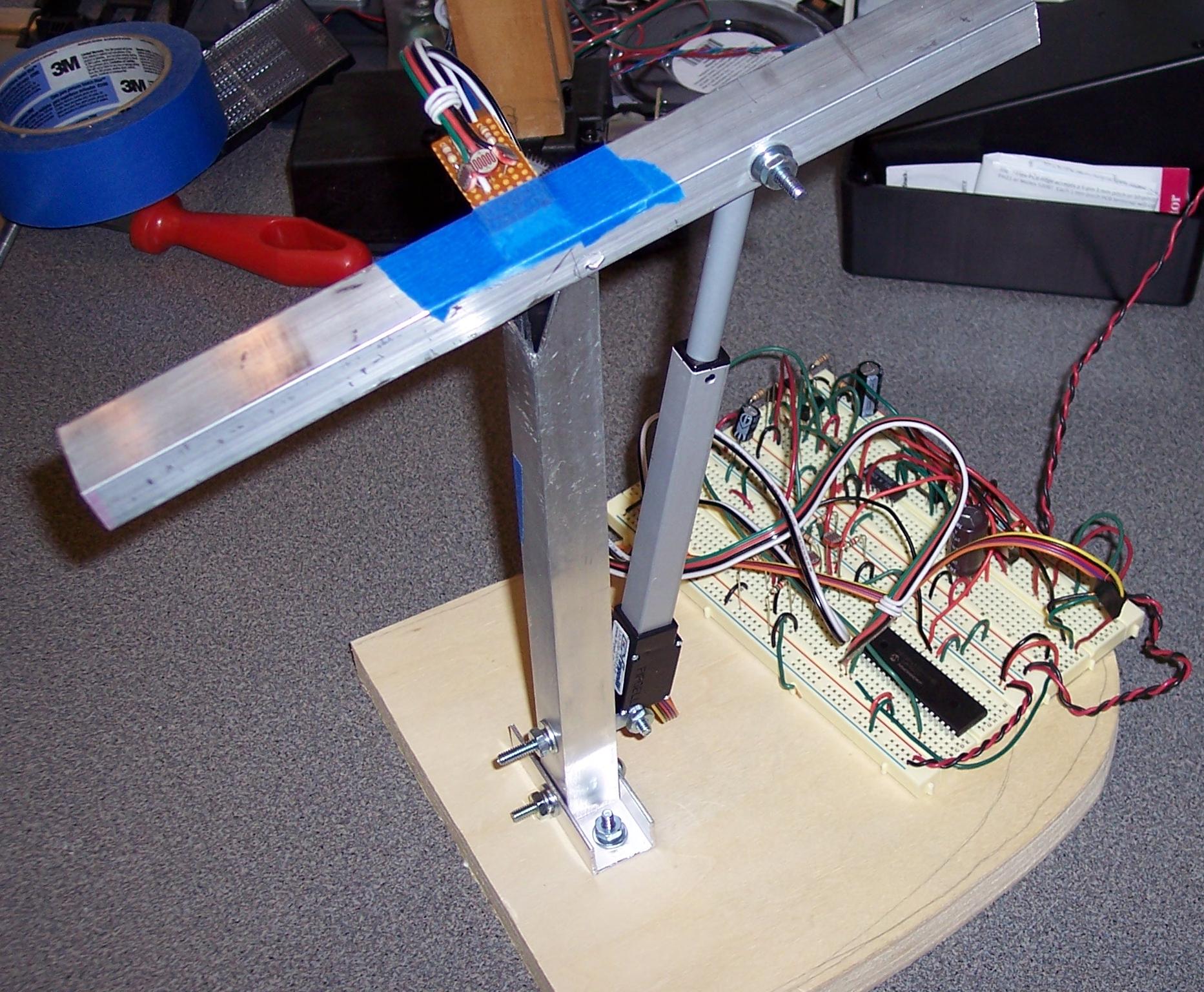
Here is a photo of the new setup.
click to enlarge/reduce
|
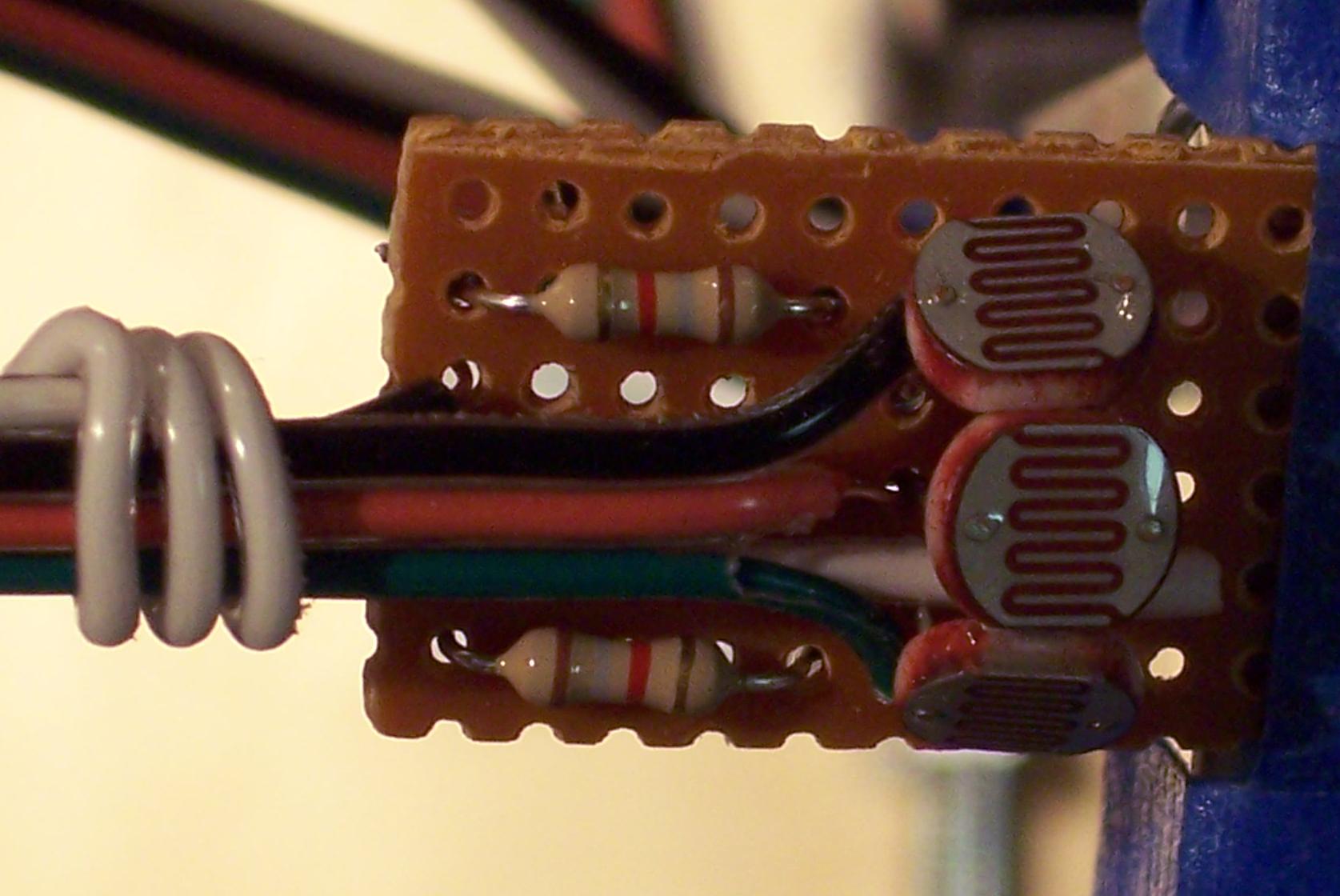
A new sensor head using three sensors allows for a more complex tracking algorithm. The strategy is to make
the voltage of the two outer sensors equal and to ensure the middle sensor is greater than the otter two.
As the system narrows in on the direction, the pulse width is reduced to prevent overshooting the position.
The linear actuator contains a built-in potentiometer that indicates the position of the linear actuator.
This feedback to the microcontroller prevents the linear actuator from over-extending. Later, I will use this
to reset the system at night.
|
click to enlarge/reduce
|
|